2019-07-12
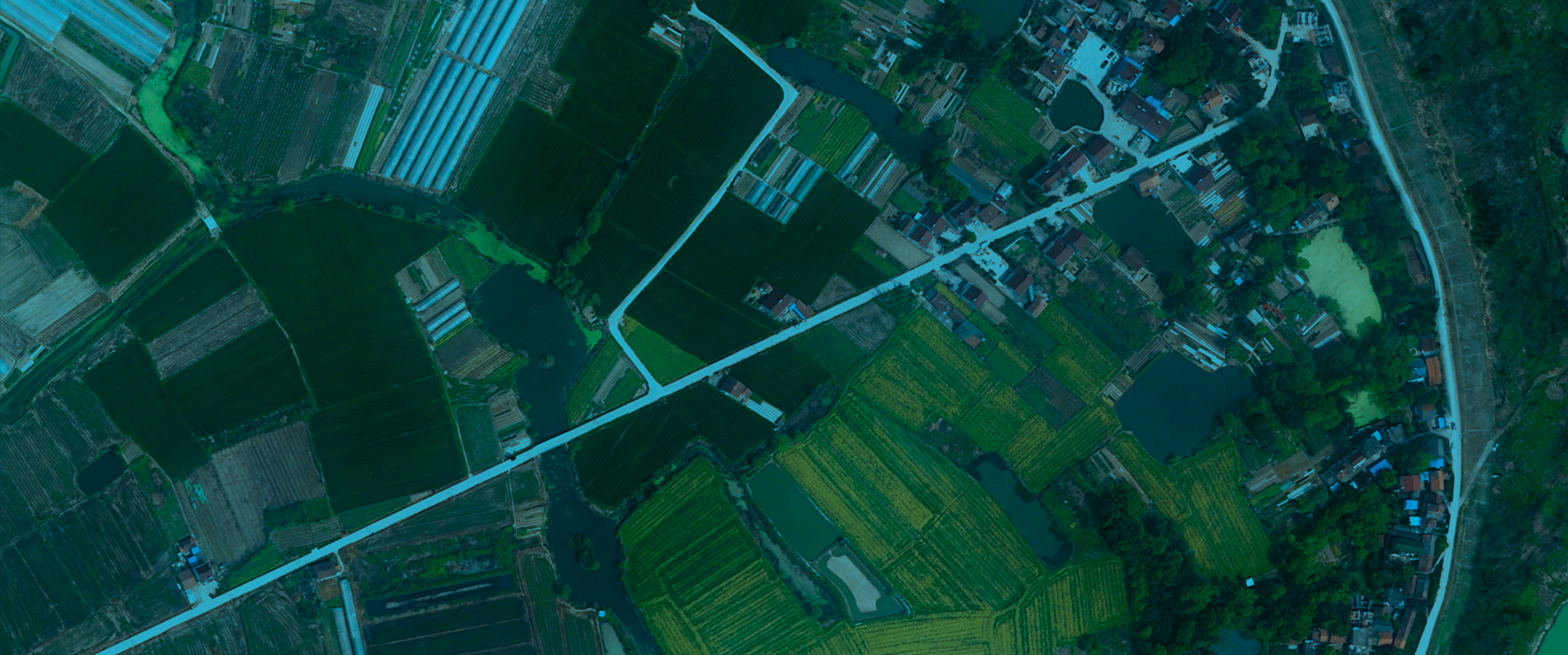
机载LiDAR技术是激光测距技术、高精度动态载体姿态测量技术和高精度动态GPS差分定位技术迅速发展的集中体现。作为一种先进的技术能够快速获取地形数据,在测绘航空摄影测量领域被广泛应用,在三维信息获取中扮演重要角色。
机载激光LiDAR系统所获取的原始LiDAR点云数据包括地面点和非地面点 (可能包括少量噪声点),如何区分地面点与非地面点 (包括植被点、建筑物点等)是广大测绘工作者共同关心的前沿问题。国内外研究者,开展基于机载LiDAR技术的分类工作,取得大量研究成果。本文就来说说低矮植被分类的方法。
一、点云空间特征识别植被点云
点云具有空间几何特征,例如点与点之间的距离特征,点云构成的平面法向量特征等。可以通过不同类型点云的空间几何特征的不同进行植被点云的识别。
二、区域增长法结合梯度分割法识别植被点
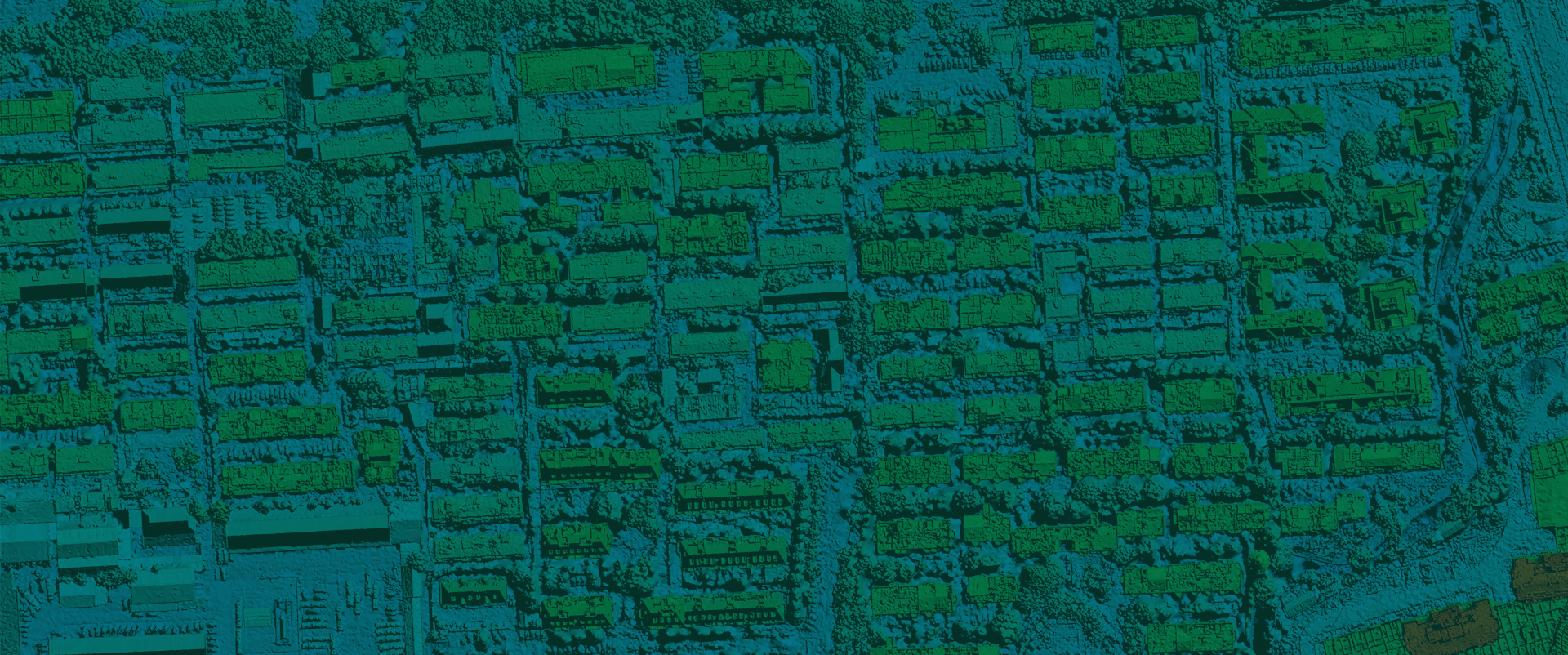
区域增长法从像素出发,按某一属性一致的原则,将属性相似的连续的像素集合成同一区域。通过区域增长法,把高程接近的地物点合并为一个区域,计算每个区域的面积。面积较大的区域划分为建筑物点滤除。但是一些面积较小的房屋没有被滤除,还有以下坡度较大的地面点被误判为植被点,所以还需进行梯度分割法识别植被点。
三、渐进加密三角网滤波算法
渐进加密三角网滤波算法通过种子点生成一个稀疏的TIN,从点云中提取了初始的地形,再逐层将满足阈值条件的点加入到三角网中,一直到所有满足条件的点都被添加到地形中去。
渐进加密三角网滤波流程:
②将点云数据进行格网划分,取高程较低的点构成三角网;
③判断待确定点到三角面片的垂直距离和到三个顶点的夹角是否满足设定阈值;
④将满足条件的点加到三角网中,重新建立三角网,达到加密三角网的效果;
⑤逐个检测每个点重复③④步,直到没有符合条件的点为止。
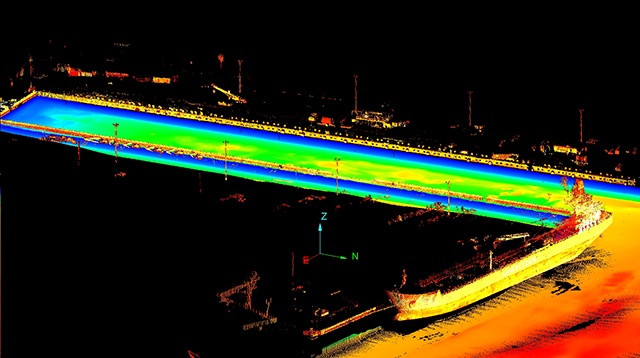
有学者孙嘉悦,张旭晴,牛雪峰等研究了区域位于吉林省西北部的白城地区,松嫩平原西部,科尔沁草原东部的某项目。其地势由西北向东南依次为低山、丘陵和平原,西南略有抬升。白城市草原辽阔,可利用草场面积 9064Km2,适用于提取植被点试验。低矮植被为植高 20cm~30cm的不易与地面点分离的植被点。选取一块宽1600像素,长1200像素,像素大小为 0.05m的区域,区域内包含1410个激光点,其中包含地表点与低矮植被点两种激光点。
在数据处理过程中,通过对研究区域进行去噪工作、保持迭代角度为3度不变、距离为0.31m不变且角度为2.5度~3度每隔0.1m做一次实验等流程后论出:
在低矮植被较多或者地势平坦的区域,迭代角度为最小值 1时,低矮植被点造成的小气泡状的等高线会被完全清除,此现象说明迭代角度值越小,低矮植被分离效果越好;
但对于低矮植被较少或者地形起伏较大的地区,迭代角度在低于26时,DEM出现失真现象,说明在低矮植被较少和地形起伏较大的情况下迭代角度与迭代距离的值并不是越小分离效果越好。
渐进加密三角网算法适用于地势平坦地区分离低矮植被点,不适合地形起伏较大的山区与城市地区。
文章来源于网络,由飞燕遥感www.feiyantech.com编辑。登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。
猜你喜欢:
厉害了,飞燕遥感LIDAR航空摄影项目累计超10万平方公里!
摄影测量与深度学习之间会产生怎样的”火花“

机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前...
公司具备PB级处理能力,通过自主研发了P3C、ImgTools、CloudTools等软件,将海量多源数据迅速加工成高精度实景三维模型、数字高程模型(DEM...

南京师范大学随园校区承载着厚重悠远的百年文脉,浸润着“东方最美校园”的灵秀之气。春日的樱花宛如晨曦中绽放的云霞,温柔地铺满枝头,给...

飞燕遥感承接了近万平方公里的点云及影像数据采集的新能源测图项目并顺利验收。项目通过自有高性能机载激光系统,完成了DEM(数字高程模型)...

近日,湖北省经信厅发布《2022年度湖北省创新产品应用示范推荐目录》(以下简称《目录》),飞燕遥感AIMS多模态航摄仪成功入选。
咨询热线:025-83216189
商务合作:15051820691
人力资源:025-83213756 转 812
15005176088
公司地址:南京市玄武区红山街道领智路56号
星河World产业园3栋8楼
版权所有:飞燕航空遥感技术有限公司 © 2019
备案号:鄂ICP备13012855号-3