2019-01-03
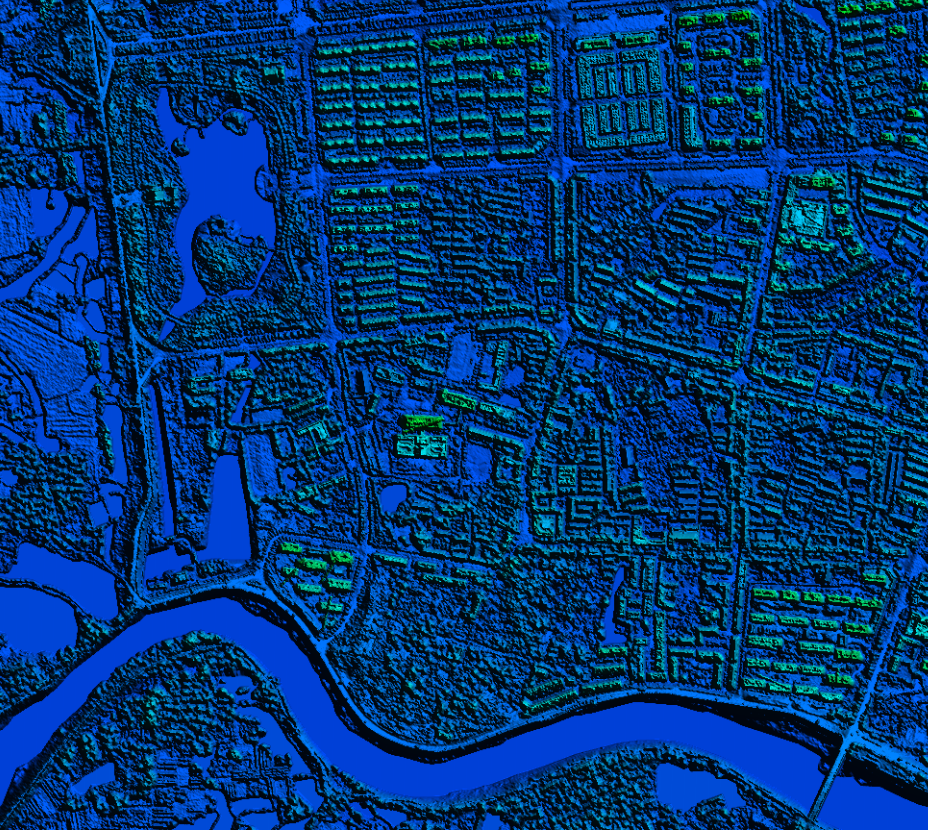
机载激光雷达(LiDAR)是一种新型主动式航空传感器,通过集成定姿定位系统(POS)和激光测距仪,能够直接获取高精度点云数据,激光雷达测绘技术正广泛应用于各个领域,在高精度三维地形数据(数字高程模型(DEM))的快速、准确提取方面,具有传统手段不可替代的独特优势。尤其对于一些测图困难区的高精度DEM数据的获取,如植被覆盖区、海岸带、岛礁地区、沙漠地区等,LiDAR的技术优势更为明显。本文主要介绍激光雷达点云数据的技术流程以及点云预处理的方法。
一、激光点云数据处理的技术流程
航摄获取的激光雷达点云数据需进行点云预处理、点云粗分类、点云人工分类和采集约束线。激光点云数据处理技术流程如图1所示。

三、激光雷达点云处理
1、点云预处理
通过航摄完成的激光点云数据是以航线为单元提供的,一方面数据量大,另一方面航线间存在重叠。为便于后期作业,需要按作业单元进行相关的镶嵌和裁切工作,形成管理和作业的数据处理单元。
1)镶嵌线的确定
在镶嵌线绘制过程中,重点考虑以下要求:
(1)航线接边差应满足设计要求;
(2)镶嵌线应尽量选择在重叠处的中央;
(3)因激光扫描日期引起航线间地物存在明显差异时,镶嵌线应尽量沿沟渠、行树、乡村路等带状覆盖的中心区域绘制,平原区域作物生长差异明显时尤其要避免在大面积平坦耕地中穿过。
2)噪声滤除
采用机载激光雷达扫描法获取的点云数据,在测量过程中不可避免地混有不合理的噪声点,噪声点的产生主要是由仪器的系统误差和被测对象的物理特性引起的。噪声点分为高于或低于地面的、孤立的、不成群的噪声点和与真实地表高差较小的、与地面点混合在一起的噪声点。
2、激光点云数据分类
利用点云处理软件提供的点云分类工具,采用人机交互的方式,对机载激光点云数据进行半自动化分类,为后期的人工分类和编辑提供初分类后的阶段点云分类成果。
非地面点云的主要反射体为构筑物和植被,其滤波过程较为复杂,其滤波质量对处理人员的业务能力要求较高,在进行人机交互点云分类处理时,应遵循以下原则:
1)以分幅数据为作业单元,根据地表覆盖类型、点云扫描日期的差异等,适当划分交互处理单元,处理单元范围线应予以保存;
2)理解分类工具的计算原理,能够熟练、灵活、综合地利用相关分类工具;
3)测试调整相关参数设置,确保达到最优分类效果,减少后期人工分类工作量,由于设备、地形、季节、气候等多方面原因,无法确定固定参数,只能根据分类后的情况确定具体参数;
4)在利用数字正射影像DOM辅助作业时,应分析其航摄日期与点云数据间的差异性。
(一)自动分类要求
人机交互点云分类所实现的处理效果,在客观上受地物覆盖类型的影响极大,应能够满足以下要求:
1)乔木林地与其覆盖的地面点应充分识别并分类,包括自然生长的林地、果园、散树、行道树等;
2)灌木林地与其覆盖的地面点应尽可能予以识别并分类,根据高山地、山地、丘陵地、平原4个地形类别对高程精度的不同要求,适当调整处理参数,尤其是平原、丘陵区域,高程精度要求较高,在处理过程中应有所侧重;
大田作物根据其作物种类、生长态势、种植密度,最大程度地实现地面点的分离,因客观条件限制而不能实现有效分类的,留待下道工序手工处理。
(二)人工分类要求
①居民区
(1)将自动分类错归为地表类的建筑物表面点、地面上的杂物点、墙角或墙面点、露天设备、假山石、煤堆上的点(被吸收比较少)及草堆、柴堆、垃圾箱、垃圾等临时性堆积物上的点都分到非地面点;
(2)房屋下的房基形状完整,在能满足精度要求的前提下,比较美观地保留和取舍点,形状不完整的在确定地形的形状或位置时可降点保持地基完整保留,很小的、单独的一个地基删掉,地基以上的点全部分到非地面点;
(3)房区中所有道路点都要保留,连接地面与建筑物的阶梯路,如大礼堂、剧院、单位门前的台阶均分到非地面点;
(4)房区里的围墙、树木、草堆、杂物、大型的人为堆出来的临时性土堆分到非地面点。
②水系及设施
(1)大面积水草的处理,具有一定高度的或漂浮在水
面上的比较密集的水草,能根据周围地形判断出具有一定高差的,放在水域层;
(2)干涸的水域点均分到地面点层,干沟、溢洪道、干
涸的地面支渠分到地面点层;
(3)主要堤、拦水坝、一般堤、防波堤分到地面点;
(4)水面上的噪声点、漂浮物以及植被等产生的点云均分到水域层。
③道路及设施
(1)高速公路、各级公路的隔离带分到非地面点;
(2)车行桥、立交桥、下跨道等与陆地相交处要拉断面仔细分出桥面、下跨道与地面的相交部位,架空部分的点分到架空路面类;
(3)过街天桥、人行桥与地面相连的部分点云数据分到地面点类,架空部分的点分到架空路面类;
(4)道路上的汽车、行人等非地面点云分到噪声层。
三、地面约束要素
激光点云数据表示地面模型,受飞行时间、点云间距、遮蔽、特殊反射等条件的限制以及客观世界复杂性的影响,部分地形特征需要使用二、三维矢量数据作为地形表面约束要素,对其进行补充约束,才能合理表示出地面模型。
地形地面约束要素,是以矢量数据的形式来补充点云数据的漏洞或对地形变化处进行约束,地形表面约束要素包括点、线、面3类矢量形式,起到补充、替换、强制变化等作用。
约束要素基本要求如下:
(一)出现下列情况时,应通过表面约束要素对激光点云局部缺陷区域进行补充约束。
(1)在激光点云受到激光扫描角度的影响,造成山体模型局部失真的情况下,应利用已有成果作为补充弥补激光点云漏洞区域;
(2)公路、河渠、水库等处因植被遮蔽造成有效地面点云明显不足,与无植被遮蔽区域的同类地面模型比较,视觉效果差异较大的带状区域,应采集硬断线或离散高程注记点对局部地面模型进行细化处理。
(二)水体约束要素优化处理湖泊、水库、坑塘及双线水等,应采集约束线进行水域置平或平差。制作DEM时,按照点云采集约束线,高程赋值应为数据获取时的瞬时水位高;制作等高线时,如果DLG数据的现势性好,以DLG水域线作为特征面,如果点云的现势性好,则按照点云采集。流动的水体要注意整个测区的水域平差,确保等高线过水正确,避免等高线二次过水现象出现。
地形表面约束要素,在作业过程中基于点云、影像信息手工采集编辑后,存贮为Shape数据文件进行提交。
四、点云分类检查
(一)目视检查原则
(1)不同的地形类别高程精度要求不同,对能够满足精度要求的区域不必再进行过度的细节处理,对不能满足精度的区域,则必须重点处理;
(2)平原地区应对大田作物区、建筑区、沟渠道路两侧区域等进行重点检查;
(3)丘陵山地应重点检查灌木林区;
(4)平原丘陵过渡地带,人类活动多,地形变换容易失真,进行重点检查;
(5)对静态、流动水体进行重点检查。
(二)检查方法
(1)检查数据是否完整;
(2)叠加彩色正射影像,判断点云覆盖物类型;
(3)按点云类别赋予相应颜色值目视进行检查;
(4)按点云类别和高度赋予相应颜色值目视进行检查;
(5)注意大面积没有分类为地面的地方。
结束语
本文结合某省中西部地区DEM的生产,探讨了激光点云数据的精度、工艺流程及激光点云数据的处理原则,探讨了激光点云的镶嵌线绘制过程中需考虑的问题,分析了激光点云的自动分类和人工分类的要求、约束要素的要求。利用激光点云制作数字高程模型DEM,能够大大提高DEM的精度,减少人工绘制等高线的工作量,将有很好的利用前景。
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。
猜你喜欢:
听说了吗?飞燕新RIEGL机载激光雷达系统到位已投入使用
飞燕遥感公司喜中广西森林资源规划设计调查机载激光雷达数据获取及处理项目两标段


过去,森林资源调查以人工地面调查为主,不仅耗时久、效率低,数据精度也不高。现在,一架搭载机载激光雷达的小型飞机,飞行1个小时可采集3...
机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前...
LIDAR点云数据的数据组织方式,提出了采用矩形规则格网形式来表达LIDAR点云数据,将LIDAR数据和影像数据的分布采用统一的形式来表达;分析各种...
公司具备PB级处理能力,通过自主研发了P3C、ImgTools、CloudTools等软件,将海量多源数据迅速加工成高精度实景三维模型、数字高程模型(DEM...
2021年,飞燕遥感凭借丰富的航摄经验与百人数据处理团队,承接了安徽省基础地理信息数据精细化更新项目。根据1:10000基础测绘精细化更新试点...
咨询热线:025-83216189
商务合作:15051820691
人力资源:025-83213756 转 812
15005176088
公司地址:南京市玄武区红山街道领智路56号
星河World产业园3栋8楼
版权所有:飞燕航空遥感技术有限公司 © 2019
备案号:鄂ICP备13012855号-3