2018-11-08
传统的三维建模是基于图片信息的场景建模和表现,这种技术存在着缺少真实感,三维几何信息不准确以及处理速度缓慢的缺点。因此,近年来基于激光扫描技术的三维建模技术成为了研究热点。
利用激光扫描仪获取的点云数据构建实体三维几何模型时,针对不同的应用对象、不同点云数据的特性,激光扫描点云数据建模的过程和方法也不尽相同。本文提出的方法能够很好的为快速三维建模进行服务,尤其是比较关注街道两侧信息的三维获取,这将大大减少人工三维数据获取及其建模的工作量,将有很好的应用前景。
激光扫描仪能够直接获取景物的深度信息,方便快捷。此外,利用激光扫描技术进行三维重建能够有效恢复出具有准确几何信息和照片真实感的三维模型。
整个点云数据建模过程包括数据预处理和模型重建。
数据预处理为模型重建提供可靠精确的点云数据,降低模型重建的复杂度,提高模型重构的精确度和速度。数据预处理阶段涉及的内容有点云数据的滤波、点云数据的平滑、点云数据的缩减、点云数据的分割、点云数据的分类、不同站点扫描数据的配准及融合等;模型重建阶段涉及的内容有三维模型的重建、模型重建后的平滑、残缺数据的处理和模型简化等。实际应用中,应根据三维激光扫描数据的特点及建模需求,选用相应的数据处理策略和方法。
一、 数据预处理
针对车载激光点云数据的特性,将数据预处理方法分为两类,半自动的数据预处理方法和全自动的数据预处理方法。
1 、半自动数据预处理方法
半自动的方法主要是利用现有的各种类型的点云数据处理软件,如三维激光扫描仪配带的相应点云数据处理软件或逆向工程领域比较著名的商业点云处理软件,一般都具有点云数据编辑、拼接与合并、数据点三维空间量测、点云数据可视化、空间数据三维建模、纹理分析处理和数据转换等功能,但它们往往具有通用的处理功能,对于特定的数据处理效果有一定的不足之处,在功能和性能上也或多或少存在一定缺陷,且一般比较昂贵。
2、全自动数据预处理方法
全自动的数据预处理方法主要是通过一定的算法来实现点云数据预处理,包括点云数据滤波,点云数据分类等。
数据滤波的目的是为了去除测量噪声。实际测量过程中存在各种因素的影响,观测数据往往不是理想的结果。为了得到合理正确的目标物体形体信息,需要对观测数据进行滤波,剔除掉含有粗差的相关观测数据和无效形体数据,从而得到目标物体形体信息的最佳估值。
由于激光扫描仪对空间信息采集的盲目性,使得激光点云数据在三维空间的分布形态呈现随机离散性,在这些离散点中,有些位于真实地形表面,有些位于人工建筑物(房屋、塔、输电线等)或自然植被(树、灌木、草等)上。如果直接利用这些点进行建模,处理的难度非常大。
因此,要在激光点云数据中提取目标对象的三维信息进而构建其三维模型,就需要对去噪滤波后的数据点进行分类,将其划分成具有单一几何特征的拓扑结构区域。
3、数据预处理结果
按照以上算法流程编写 MATLAB 程序,实现地面点与非地面点的分离,用本算法进行滤波时要注意滤波参数的设置,通常要根据不同地表形态来选取适当的参数。应用本算法对铁路两旁的数据进行了滤波处理,前后对比效果如图所示,从中可以看出该算法能很好的实现地面点与非地面点的分离,但是该算法需要输入很多滤波参数,如地形坡度,窗口大小等,这些直接影响着滤波的效果,因此要实现很好的滤波需要根据实际地形情况反复试验几个滤波参数。

滤波前点云数据

滤波后点云数据
二、 模型重建
点云数据经过滤波分类处理之后,就可以针对分出来的不同类别采用不同的建模方法了,这里滤波分类主要分为地面点和非地面点,所以,模型重建也通过这两类来分析。
1、 地面点建模
与通常的栅格影像数据不同,激光点云数据是离散分布的不规则点数据。因此,要用模型的形式表示地形表面分布,就需要进行网格化处理,即将离散的点连续化。我们采用三角网的方式对数据进行组织,地形表面由连接数据点的三角形构成,通过进行插值实现对地形表面的逼近和近似,这是对地形表面的一种精确表达。
例如,采用 TinModel 5 提供的构网模块实现了将分类后的离散的地面点构建为不规则三角网(TIN)。

2、非地面点建模
非地面点比较复杂,包括建筑物、植被、道路两旁设施等。随着 AutoCAD、Maya 、逆向工程等三维建模软件的出现,可以通过人机交互的手段来辅助三维建模,如图所示为利用逆向工程软件 ImageWave 对城市道路两旁的建筑物点云数据进行建模效果图。

利用 ImageWave 对点云数据建模
利用软件也能够对模型进行纹理映射与可视化。但这些方法费时费力,而且对使用者的技巧要求很高,对于结构复杂、不规则的场景建模更是无能为力。
显然纯粹地利用三维建模软件实现激光点云非地面点数据的模型重建,并非一个好的办法,研究怎样从这些离散的三维点云中快速准确地构建出真实的模型显得尤为重要,逆向工程中用激光扫描某个特定物体获得的数据直接重构物体,但此方法在车载激光扫描测量中不可行,因为是它是自动目标采集,扫描无特定目的,不能控制扫描哪些物体。
所以,激光扫描的数据量非常大,如果直接进行三维重构的话消耗太大,必须先对距离图像进行处理,提取出特征点、特征线和特征面再继续建模。由于到目前为止,还没有距离图像分割和特征提取的成熟、可行方法,使得当前的激光扫描系统都采用与 CCD 或类似图像采集设备集成,其中距离图像以用于构建高精度的DEM 为主,图像分割和特征提取则采用 CCD影像数据解决。这种联合作业方式使得系统运行成本高、控制比较复杂、数据存储量大、多源数据处理与融合复杂。

将建好的模型可视化效果图
目前对距离图像的数据处理方法集中在构建DSM/DEM 上,或者附加 CCD 影像进行融合,对直接从距离图像中进行目标分类和特征提取的研究比较缺乏。鉴于此本文通过阅读文献,针对车载激光点云数据总结了以下的建模方法和步骤。
(1)对非地面点进一步分类
通过车载扫描系统获得的点云数据中非地面点存在很多杂点,受车体行驶周围影响很大,如要对道路两旁建筑物建模,则建筑物点云受路两旁的树木,广告牌、线杆以及周围车辆等影响很大。这样直接用这些点云数据进行建筑物建模,效果会很差,所以有必要对非地面点进一步分类,可分为建筑物,线杆以及其它地物点(如植被、路灯、公交站牌、广告牌等)等。其中建筑物是非地面点中最重要的部分,也是通常最关心的地物。
(2)通过点云数据对建筑物进行特征提取
利用前面提出的数据分类方法,考虑建筑物自身的几何特征,设计了一个简单的建筑物特征提取方法:首先,从分类后的激光扫描数据中提取出建筑物数据;然后,从建筑物数据中提取出每个格网单元中 Z 值最大和 Z 值最小的数据点,这些点就是建筑物的特征点;后续处理中,可以从这些特征点中探测线特征或者用线段拟合这些特征点得到建筑物的特征线,也可以导入专业建模软件直接参与三维建模。
(3)线杆提取
线杆提取基于以下的假设:1)、杆是独立的直线;2)、杆近乎垂直;3)、杆有最小高度;4)、杆应在建筑物或墙面的前面。当然以上假设也限制了一些杆的提取,比如杆正好在建筑物或墙面附近,这样干扰点比较多,本算法暂不考虑这些。设置一个距离门限值来识别独立的直线,线的独立性通过计算线间的垂直中心距离来得到;设置一个倾斜角门限值来识别直线在倾斜角范围内是否垂直;有时,杆的底部被植物或小的物体掩藏起来,此时只能得到杆的上部。
因此,设置另一个门限值来检查杆的底部的位置;当杆目标很小时,激光数据也可能不包含反射自杆的点,这些小物体的获取依赖于车速。车速决定激光数据的沿轨迹分辨率,当车速过快时极少杆被扫描到,所以有些时候还要人工对比一下图像数据再做决定。
(4)其它地物提取
其它地物如树,对其进行特征提取和重构由于树形状的极度不规则性,数据处理非常复杂,且在城市环境中知道树的具体形状特征意义也不大,一般情况下只要知道树的位置和高度既可。
综上所述,结合某三维城市建模案例探讨了基于激光点云数据的数据预处理方法和模型重建方法,探讨了半自动数据预处理方法和全自动数据预处理方法,给出了全自动数据预处理的算法流程,在模型重建中,探讨了地面点重建和非地面点重建。该方法能够很好的为快速三维建模进行服务,尤其是比较关注街道两侧信息的三维获取,这将大大减少人工三维数据获取及其建模的工作量,将有很好的应用前景。
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。

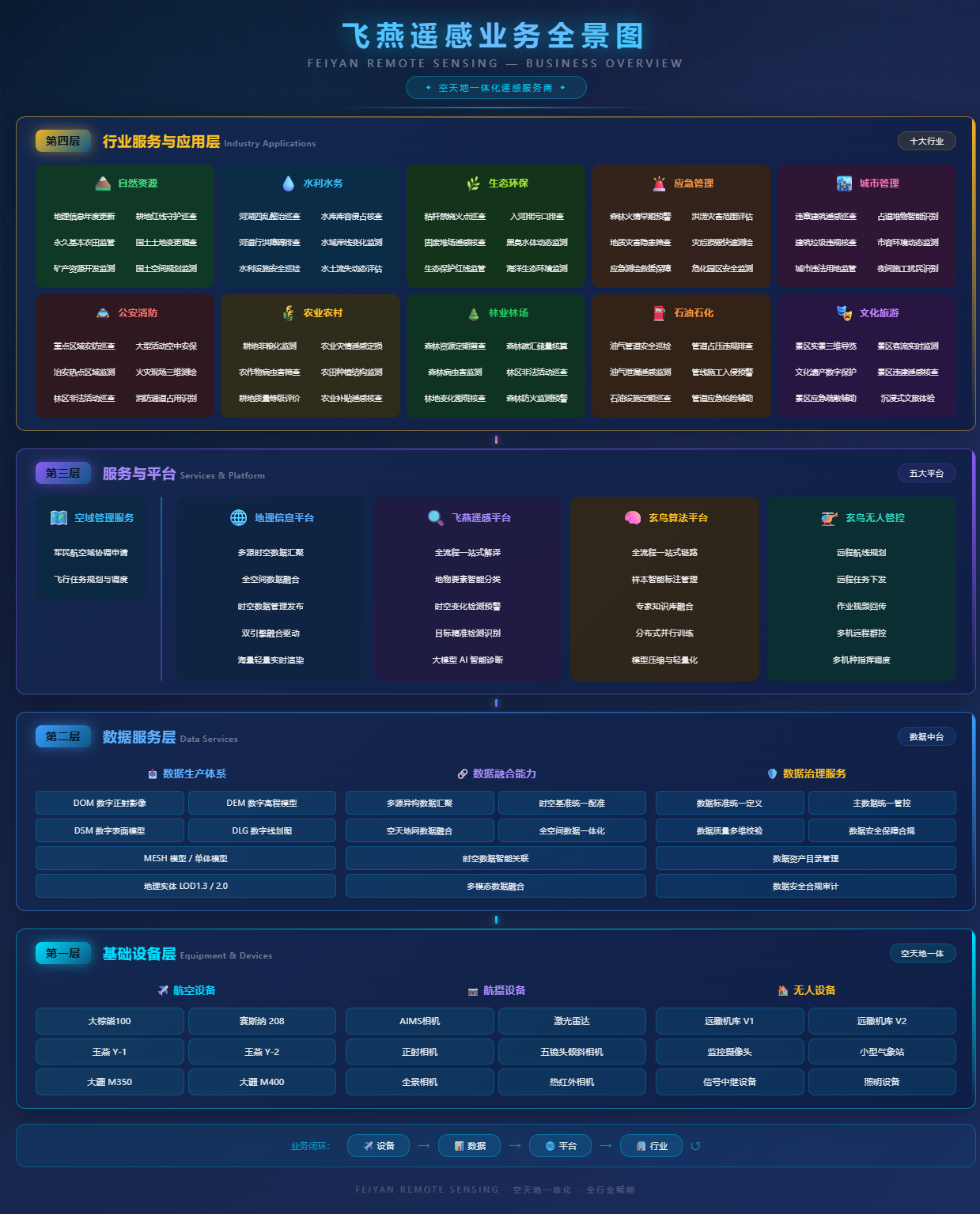
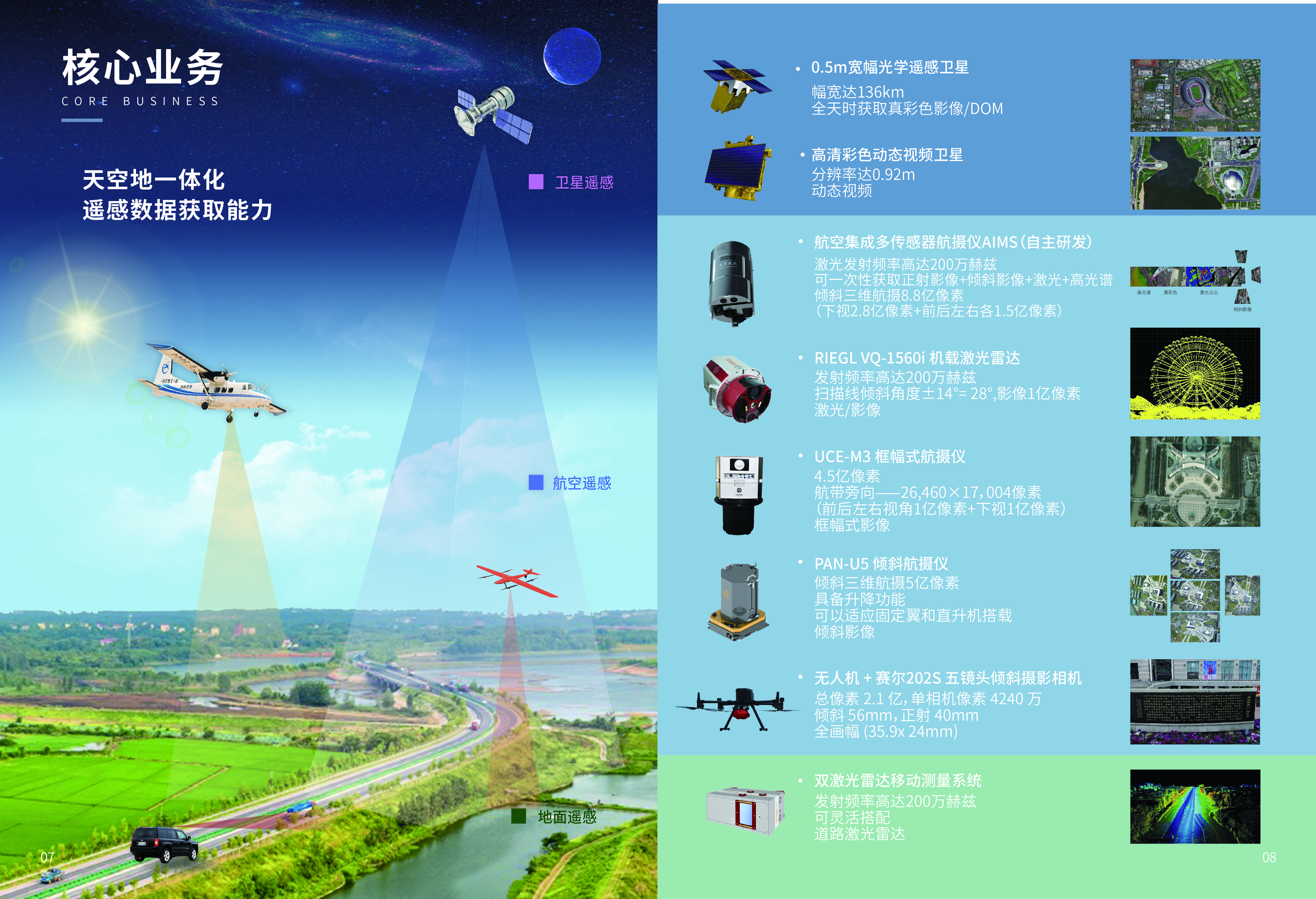
从地下轨道交通到跨海集群工程,从化工园区安全监管到城市全域精细化治理,飞燕遥感依托AIMS多模态航摄技术、机载激光雷达、倾斜摄影...
化工行业在国民经济中占有重要地位,化工品生产过程复杂,涉及的危险化学品易燃易爆、有毒有害,一旦发生事故破坏力强,社会影响大。近年来...

随着“实景三维中国”建设计划的推进,大规模、大范围、高精度的实景三维生产需求日益增长。飞燕遥感带领大家从方法原理和特点来系统了解三...
实景三维倾斜建模是指采用倾斜摄影技术制作的实景三维模型,也可以拆分为两个概念来解释:一个是倾斜摄影,一个是实景三维。
倾斜摄影用于实景三维建模,倾斜摄影是近年来航测领域逐渐发展起来的新技术,相对于传统航测采集的垂直摄影数据,通过新增多个不同角度...
咨询热线:025-83216189
商务合作:15051820691
人力资源:025-83213756 转 812
15005176088
公司地址:南京市玄武区红山街道领智路56号
星河World产业园3栋8楼
版权所有:飞燕航空遥感技术有限公司 © 2019
备案号:鄂ICP备13012855号-3