2018-10-23
激光雷达(激光探测及测距)主要用激光器作为发射光源,采用光电探测技术手段的主动遥感设备,是一项光学遥感技术。主要用于机载激光制图应用程序中,正日益成为替代传统测量技术(如摄影测量)的具有成本效益的新技术。
激光雷达由发射系统、接收系统 、信息处理等部分组成。它利用激光对地球表面进行密集采样,以产生高精度的 x,y,z 测量值。能生成可通过 ArcGIS 进行管理、显示、分析以及共享的离散多点云数据集。
完成激光雷达数据采集测量之后,将通过分析激光的时间范围、激光的扫描角度、GPS 位置和 INS 信息将点数据后处理成高度精确的地理配准 x,y,z 坐标。
从激光雷达系统发射的激光脉冲会从地表面和地表上的物体反射:植被、建筑物以及桥梁等等。发射出的一个激光脉冲可能会以一个或多个回波的形式返回到激光雷达传感器。任何发射出的激光脉冲在向地面传播时,如果遇到多个反射表面则会被分割成与反射表面一样多的回波。

最先返回的激光脉冲是最重要的回波,它将与地表最高的要素相关联,比如树顶或建筑物顶部。第一个回波也可能表示地面,在这种情况下激光雷达系统只会检测到一个回波。
多个回波可以检测在向外发射的激光脉冲的激光脚点内的多个对象的高程。中间的回波通常对应于植被结构,而最后的回波对应于裸露地表 terrain 模型。
最后的回波并非始终从地面返回。比如,考虑这样一种情况,一个脉冲在向地面发射的过程时撞到粗壮的树枝,根本没有达到地面。在这种情况下,最后的回波不是从地面返回,而是从反射了整个激光脉冲的树枝返回。
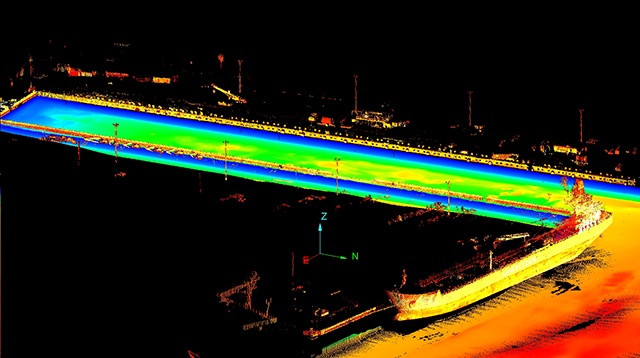
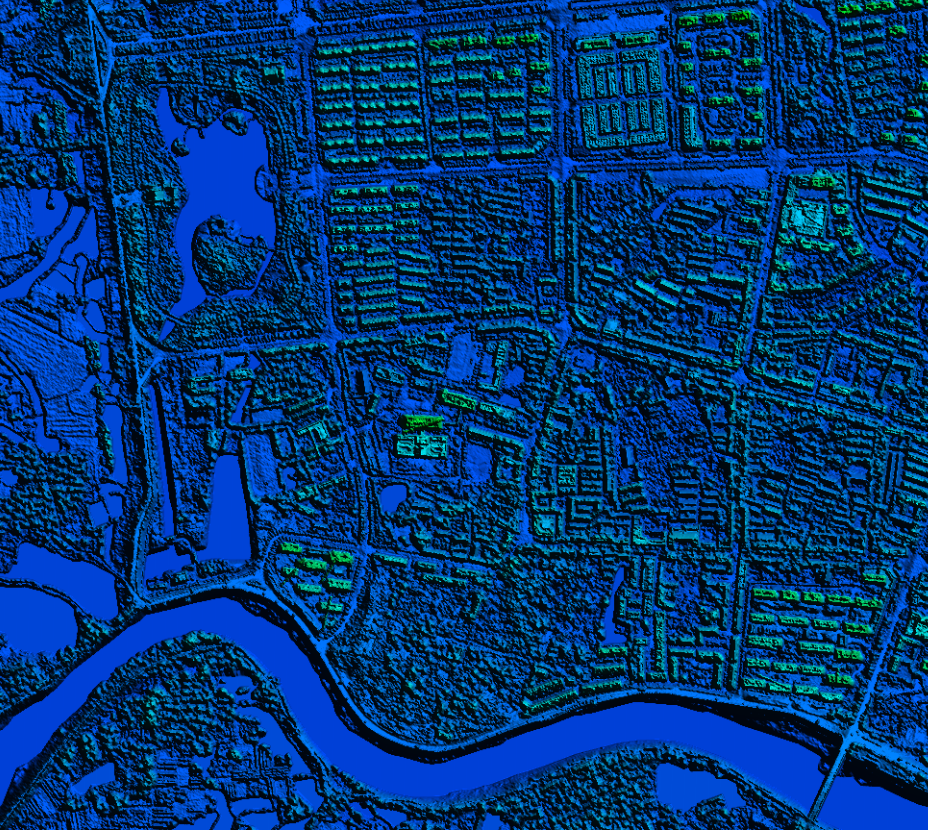
经过后处理,从空间上进行过组织的激光雷达数据被称为点云数据。初始点云是 3D 高程点的大集合,其包括 x 值、y 值、z 值以及 GPS 时间戳等其他属性。在初始激光雷达点云经过后处理后,可对激光遇到的特定表面要素进行分类。地面、建筑物、森林冠层、高速公路以及任何激光束在测量过程中遇到的物体构成了激光点云数据。

过去,森林资源调查以人工地面调查为主,不仅耗时久、效率低,数据精度也不高。现在,一架搭载机载激光雷达的小型飞机,飞行1个小时可采集3...
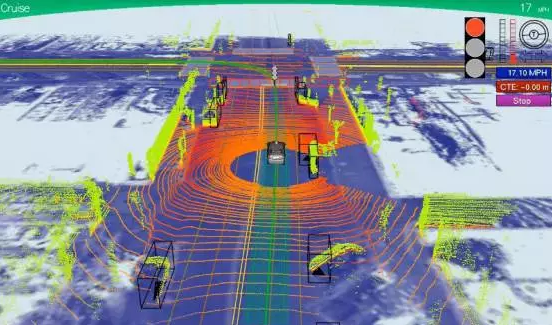
机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前...
LIDAR点云数据的数据组织方式,提出了采用矩形规则格网形式来表达LIDAR点云数据,将LIDAR数据和影像数据的分布采用统一的形式来表达;分析各种...
公司具备PB级处理能力,通过自主研发了P3C、ImgTools、CloudTools等软件,将海量多源数据迅速加工成高精度实景三维模型、数字高程模型(DEM...
2021年,飞燕遥感凭借丰富的航摄经验与百人数据处理团队,承接了安徽省基础地理信息数据精细化更新项目。根据1:10000基础测绘精细化更新试点...
咨询热线:025-83216189
商务合作:15051820691
人力资源:025-83213756 转 812
15005176088
公司地址:南京市玄武区红山街道领智路56号
星河World产业园3栋8楼
版权所有:飞燕航空遥感技术有限公司 © 2019
备案号:鄂ICP备13012855号-3