2025-11-28
采用 DJI Terra 软件解算前期采集的激光雷达扫描数据,输出原始点云数据,采用 LIDAR360、点云智绘软件对 DJI Terra 生成的点云数据进行点云去噪、点云分类、点云编辑、点云重采样等步骤,生成符合要求的雷达点云数据。
(1) 平面中误差和航带拼接平面中误差优于平均点云间隔;平地高程中误差和航带点云接边限差优于 0.35 米,丘陵地高程中误差和航带点云接边限差优
于 0.85 米,山地高程中误差和航带点云接边限差优于 1.75 米;粗差率≤5%。
(2) 数据坐标必须与给定的坐标保持一致,点云模型数据必须与倾斜摄影模型保持一致,准确反映现状。
(3) 数据格式采用 LAS 格式。
采用 DJI Terra 软件进行激光点云的解算工作。首先新建激光雷达点云处理任务,然后导入激光雷达源文件,设置相应参数后开始重建,最后输出 las 格式的点云数据。
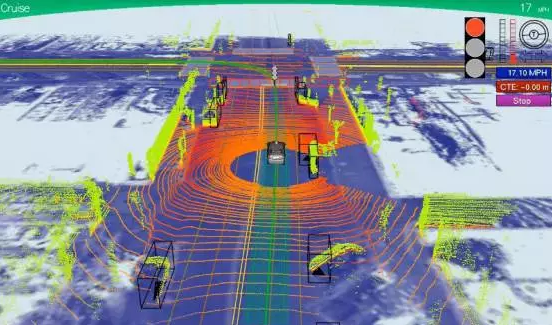
将解算后的点云数据加载到 LIDAR360 软件中,利用去噪工具去除点云中的高位粗差和低位粗差,提高点云数据质量。
对去噪后的点云数据进行分类,将点云中的地面点和建筑物点划分入相应类别。
a. 地面点分类
利用地面点分类工具,根据测区实际情况对最大建筑物尺寸、最大地形坡度等参数进行设置,迭代角度一般设置为 10°至 30°,迭代距离一般设置为 1 至 2 米,地形起伏较大时,迭代角度和迭代距离可适当同步调大。
b. 建筑物分类
利用建筑物分类工具,根据测区实际情况对邻域半径、距离阈值等参数进行设置,邻域半径一般设置为点间距的 4 至 6 倍,距离阈值一般设置为略大于点间距。

因自动分类算法的准确度很难达到百分之百,通过人机交互式编辑分类将错误分类和漏分类的点云数据分到指定类别,将建筑物墙面点分到未分类点。
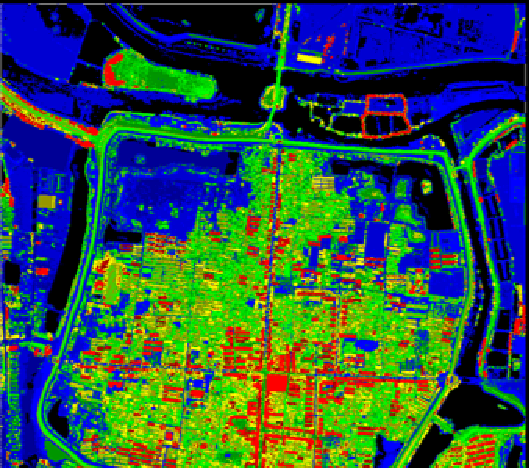
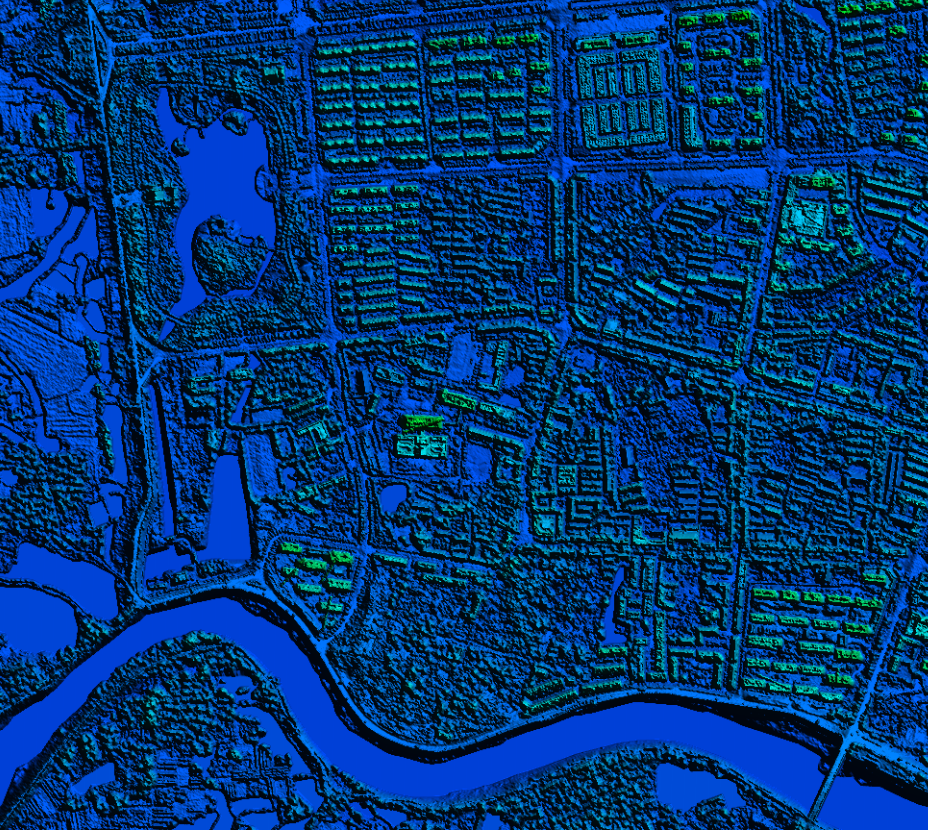
图 5.6-6 点云编辑
利用按类别提取工具,从点云中提取需要的地面地、建筑物点,保存成单独的文件。
利用重采样工具,采用最小点间距的采样方法,对按类别提取后的点云数据进行重采样,在满足点云密度要求的前提下减少点云数量。
完成重采样的激光点云数据成果需经过质量检查合格后才可整理提交。根据(二) 中各项要求并套合倾斜摄影模型对点云数据进行检查,保证点云数据的质量。

过去,森林资源调查以人工地面调查为主,不仅耗时久、效率低,数据精度也不高。现在,一架搭载机载激光雷达的小型飞机,飞行1个小时可采集3...
机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前...
LIDAR点云数据的数据组织方式,提出了采用矩形规则格网形式来表达LIDAR点云数据,将LIDAR数据和影像数据的分布采用统一的形式来表达;分析各种...
公司具备PB级处理能力,通过自主研发了P3C、ImgTools、CloudTools等软件,将海量多源数据迅速加工成高精度实景三维模型、数字高程模型(DEM...
2021年,飞燕遥感凭借丰富的航摄经验与百人数据处理团队,承接了安徽省基础地理信息数据精细化更新项目。根据1:10000基础测绘精细化更新试点...
咨询热线:025-83216189
商务合作:15051820691
人力资源:025-83213756 转 812
15005176088
公司地址:南京市玄武区红山街道领智路56号
星河World产业园3栋8楼
版权所有:飞燕航空遥感技术有限公司 © 2019
备案号:鄂ICP备13012855号-3