2024-04-19
三维建模的技术主要分为人工建模、倾斜摄影建模和激光雷达建模3种。人工建模模型效果好,缺点是周期长、非实景建模,一般适用于小范围、单个对象建模;倾斜摄影建模效率高、成本低、实景模型,缺点是受外部因素影响大、细节效果不够好,一般适用于大范围建模;地面激光雷达抗干扰强、效果好,但成本较高、范围小,一般适用于古建筑、单个对象。
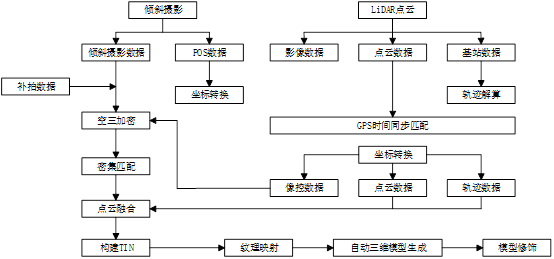
传统的倾斜摄影在数据采集过程中,存在物体遮挡、航摄盲区等客观因素限制,造成三维模型扭曲、空洞、纹理拉花等问题。基于无人机倾斜摄影、机载激光雷达、地面激光雷达融合建模的方法,同时采用大疆无人机补拍重点建筑纹理数据对倾斜摄影数据进行补充,将4种数据相融合进行实景三维重建,可以获得高效率、低成本、精细化的实景三维模型。
五镜头传感器相机采集5个角度的航摄影像。
利用无人机补拍重点建筑纹理数据。
图像数据预处理:对采集影像进行检查和预处理,主要包括航片质量检查、航片匀色等。
空中三角测量:可使用重建大师软件结合POS系统提供的外方位元素和相机安装位置关系,模拟包括倾斜影像在内的所有影像的地表投影范围,采取由粗到精的金字塔匹配策略,在各级影像上进行同名点自动匹配和自由网光束法平差,得到较好的同名点匹配结果。
根据设备性能、点云密度、重叠度和飞行范围制定飞行方案,包括飞行的时间、地点、基站架设等。
对原始数据进行解码,将基站观测数据、基站坐标和机载GNSS观测数据、IMU数据导入软件进行POS数据处理。
采用控制点检查的方式检查点云数据精度。
地面扫描时,需对扫描场景进行扫描区块划分,拆分为多个合理的区块,各区块之间要有重叠,且对各区块提前进行扫描线路规划,尽可能围绕地物绕8字形闭合线路。
点云去噪:由于扫描环境、扫描目标、设备参数等原因,扫描过程中会产生部分噪声数据,这些噪声会影响点云配准的精度。通过不同的滤波方法,如高斯滤波、随机采样一致性滤波,完成点云数据的滤波与平滑。
点云拼接:常用的拼接方法为自动拼接和手动拼接。自动拼接可通过提取重叠部分点云的特征点或人为设置公共靶标进行配准;人工配准则需要人工选取不同的特征点,利用多组特征点计算得出旋转矩阵完成拼接。
点云坐标系转换:拼接完成后的点云数据通过控制点进行坐标转换到CGCS2000中。
首先利用重建大师进行多源数据融合三维模型生产,将合格的倾斜摄影空三加密成果自动生成的密集点云和机载、地而采集的点云通过赋予不同的权重进行点云融合、配准,共同构建不规则三角网TIN;然后对三角网进行平滑和简化后生成白模;最后将倾斜影像的纹理自动映射到白模上,生成高精度的三维模型。
传统倾斜摄影建模由于建筑物遮挡,采集不到房檐下数据、纹理覆盖不够或白模质量差。融合地面激光雷达扫描数据后,房檐下纹理清晰可辨,白模精度大幅提高,模型棱角分明。传统倾斜摄影建模与多源数据融合建模效果对比如下:
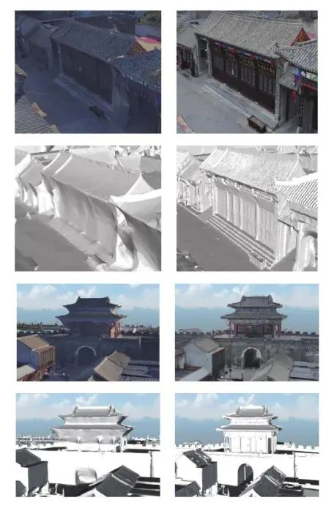
从模型效果上来看,传统倾斜摄影测量生成的模型有部分结构缺失,如城门的门洞、店铺的窗格等。在建筑物的房檐下,由于遮挡,影像的重叠度不足,使得采用传统倾斜摄影房檐下模型结构生成不完整,纹理扭曲、拉花严重。采用多源数据融合技术可使模型的效果大大提升,如房檐下模型结构完整,地下部分结构清晰可见,纹理清晰。

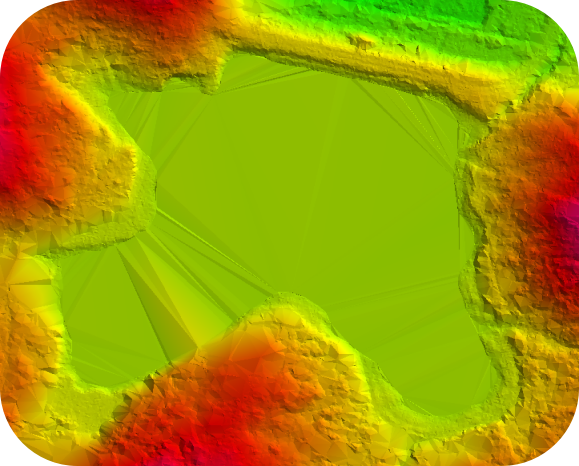
一、定义 数字高程模型(DEM),是一种用数字形式表示地表高程的模型。它基于地表的高度数据,以离散的点或栅格形式呈现地形的高度变...
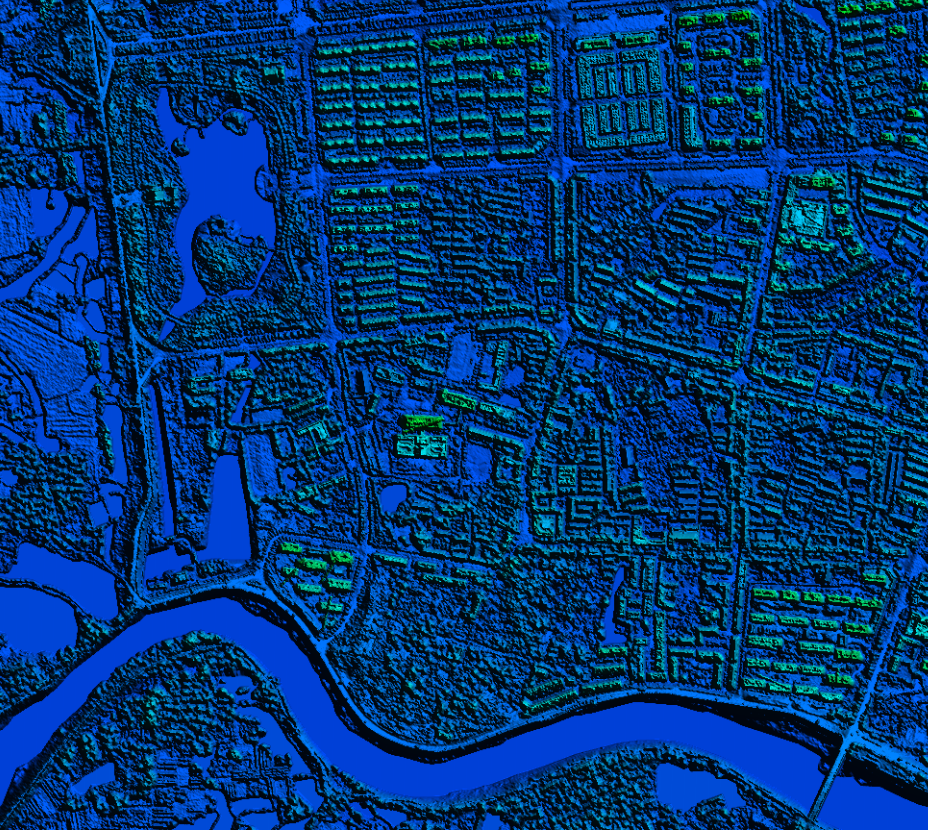
近日,由飞燕航空遥感技术有限公司(以下简称“飞燕遥感”)承接的上饶市平地与丘陵地区2米格网数据(DEM、DSM)制作项目顺利通过专家组验收...
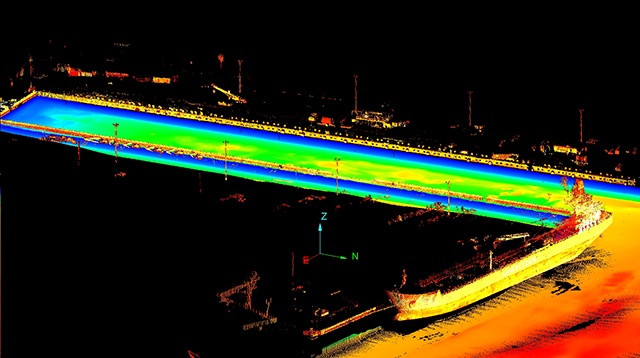
机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前...
2021年,飞燕遥感凭借丰富的航摄经验与百人数据处理团队,承接了安徽省基础地理信息数据精细化更新项目。根据1:10000基础测绘精细化更新试点...

近日,飞燕遥感公司喜中2019年广西森林资源规划设计调查机载激光雷达数据获取及处理项目
咨询热线:025-83216189
商务合作:15051820691
人力资源:025-83213756 转 812
15005176088
公司地址:南京市玄武区红山街道领智路56号
星河World产业园3栋8楼
版权所有:飞燕航空遥感技术有限公司 © 2019
备案号:鄂ICP备13012855号-3