2022-05-11
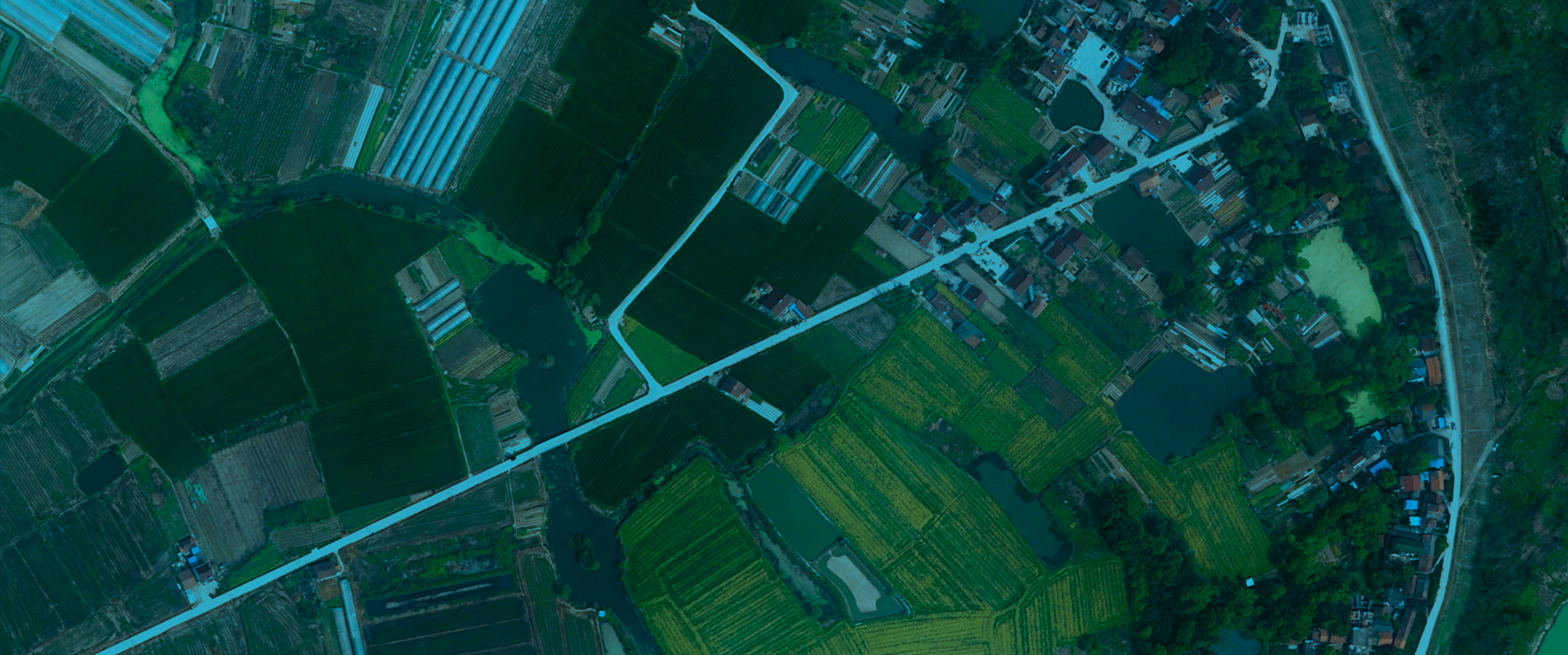
实景三维模型的真实感在于与现实世界具有相同的色彩,这便源于航摄影像。目前,主要采用倾斜航摄,通过在同一飞行平台上搭载多台传感器,可以同时从垂直、倾斜等不同角度采集影像,获取地面物体更为完整准确的信息。
图1 五镜头相机倾斜航摄
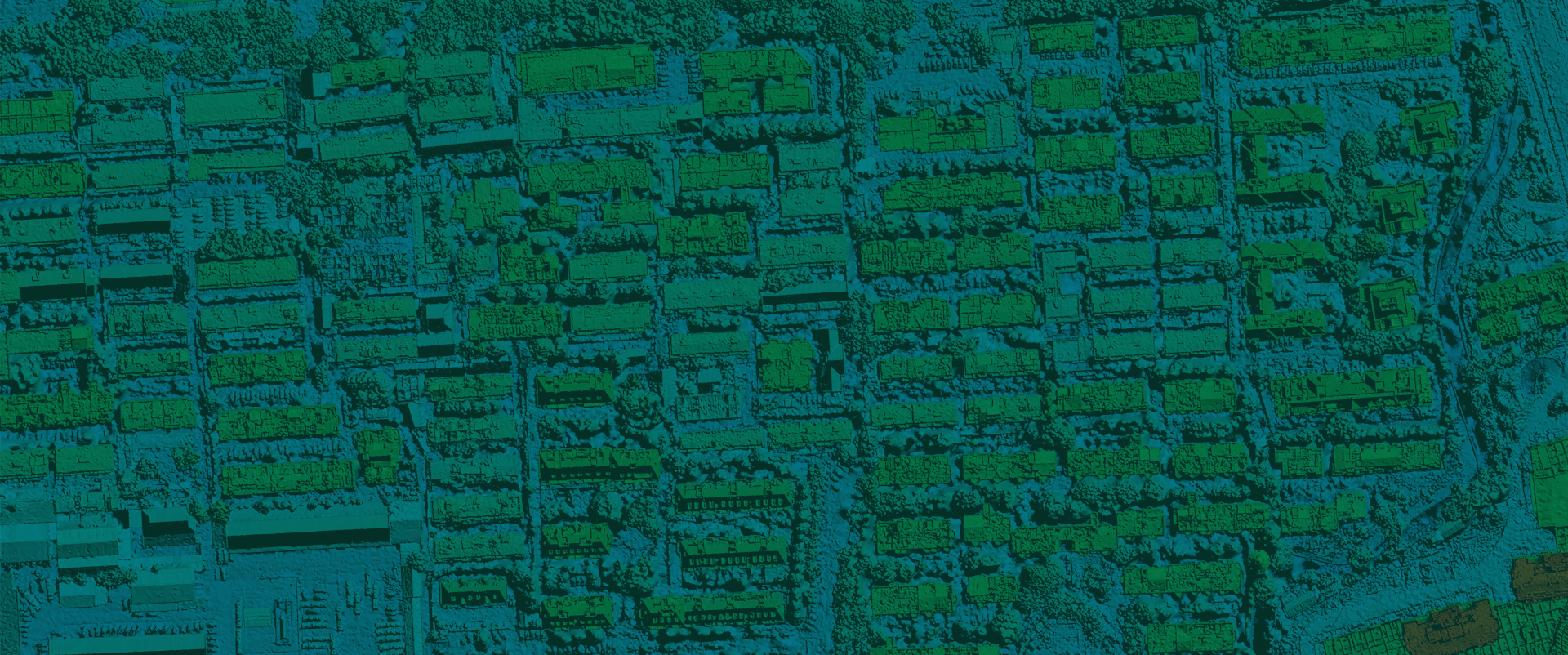
获取影像后,需要通过摄影测量的技术手段将二维的影像处理成实景三维模型。摄影测量是基于相邻影像之间重叠部分的同名点进行影像匹配,获得相邻影像之间的视差和深度信息的一种技术。结合每张航摄影像的位置、姿态信息,利用摄影测量技术解算出相邻影像之间的空间关系。基于这些关系通过影像密集匹配将影像中的各像素在三维空间中离散化,成为三维空间中一个个离散的带有彩色的点,称之为“彩色点云”。

图2 彩色点云
彩色点云既有点云的几何特性,又带有彩色信息。通过三角构网方法,将离散的点云点连接形成三角形面片并构成三角网,作为实景三维模型中的基础模型——“白模”。

图3 白模效果
最后,将彩色点云的彩色属性根据点云的空间位置映射到白模表面,这样就制作完成既有几何外观又有真实彩色纹理的实景三维模型。

图4 实景三维模型效果

倾斜摄影技术的出现后,在违建巡查工作中是一种惯用的技术
咨询热线:025-83216189
商务合作:15051820691
人力资源:025-83213756 转 812
15005176088
公司地址:南京市玄武区红山街道领智路56号
星河World产业园3栋8楼
版权所有:飞燕航空遥感技术有限公司 © 2019
备案号:鄂ICP备13012855号-3